Robot Skill Learning Without a Cost Function
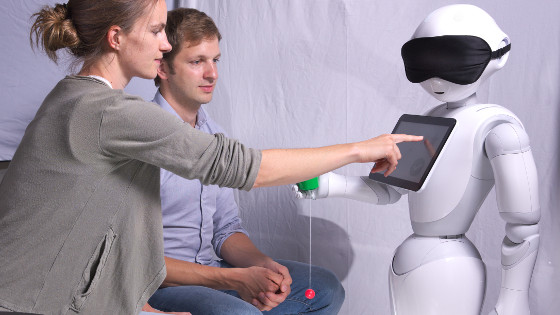
A User Study on Robot Skill Learning Without a Cost Function: Optimization of Dynamic Movement Primitives via Naive User Feedback. Frontiers in Robotics and AI 2018
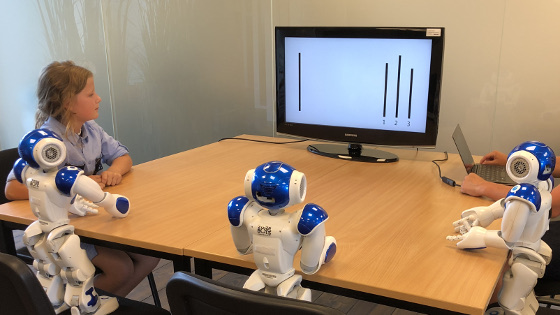
Children Conform, Adults Resist
Read the full paper:
Children conform, adults resist: A robot group induced peer pressure on normative social conformity. Science Robotics 2018
nostrum consequatur. Illo asperiores autem sit vitae. Quaerat beatae dicta rem veritatis quod ut sed ipsa.Robots Show Us How to Teach Them
Read the full paper:
Robots Show Us How to Teach Them: Feedback from Robots Shapes Tutoring Behavior during Action Learning. PloS ONE 2014
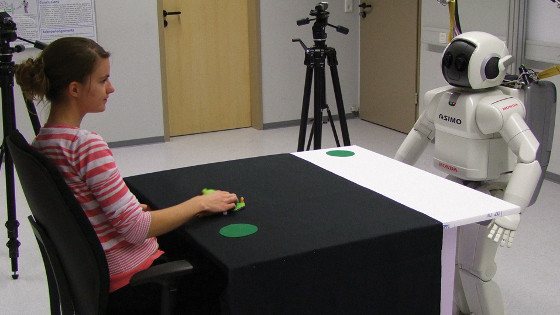
Alignment to the Actions of a Robot
Do beliefs about a robot’s capabilities influence alignment to its actions?
Read the full paper:
Alignment to the Actions of a Robot. Social Robotics 2014
The Coco-Game
Studying the Co-Construction of Interaction Protocols in Collaborative Tasks with Humans
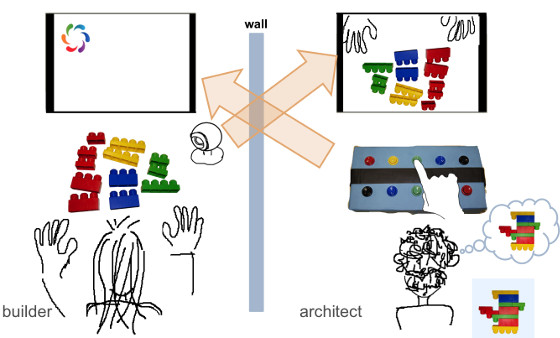
In interaction, humans align and effortlessly create common ground in communication, allowing efficient collaboration in widely diverse contexts. Robots are still far away from being able to adapt in such a flexible manner with non-expert humans to complete collaborative tasks. Challenges include the capability to understand unknown feedback or guidance signals, to make sense of what they refer to depending on their timing and context, and to agree on how to organize the interaction into roles and turns. As a first step in approaching this issue, we investigate here the processes used by humans to negotiate a protocol of interaction when they do not already share one. We introduce a new experimental setup, the Coco-Game, where two humans have to collaborate to solve a task. The channels of communication they can use are constrained and force them to invent and agree on a shared interaction protocol in order to solve the task. These constraints allow us to analyze how a communication protocol is progressively established through the interplay and history of individual actions. We report preliminary results obtained from a pilot study, and discuss how the understanding of strategies used by humans could be useful to achieve more flexible HRI.
Watch a presentation of the paper:
Read the full paper:
Studying the Co-Construction of Interaction Protocols in Collaborative Tasks with Humans. Proc. of the 4th Joint IEEE International Conference on Development and Learning and on Epigenetic Robotics Genoa Italy 2014